
2025-06-27 00:01:21
作者:科技
分享:


### 自动驾驶趣味瞬间
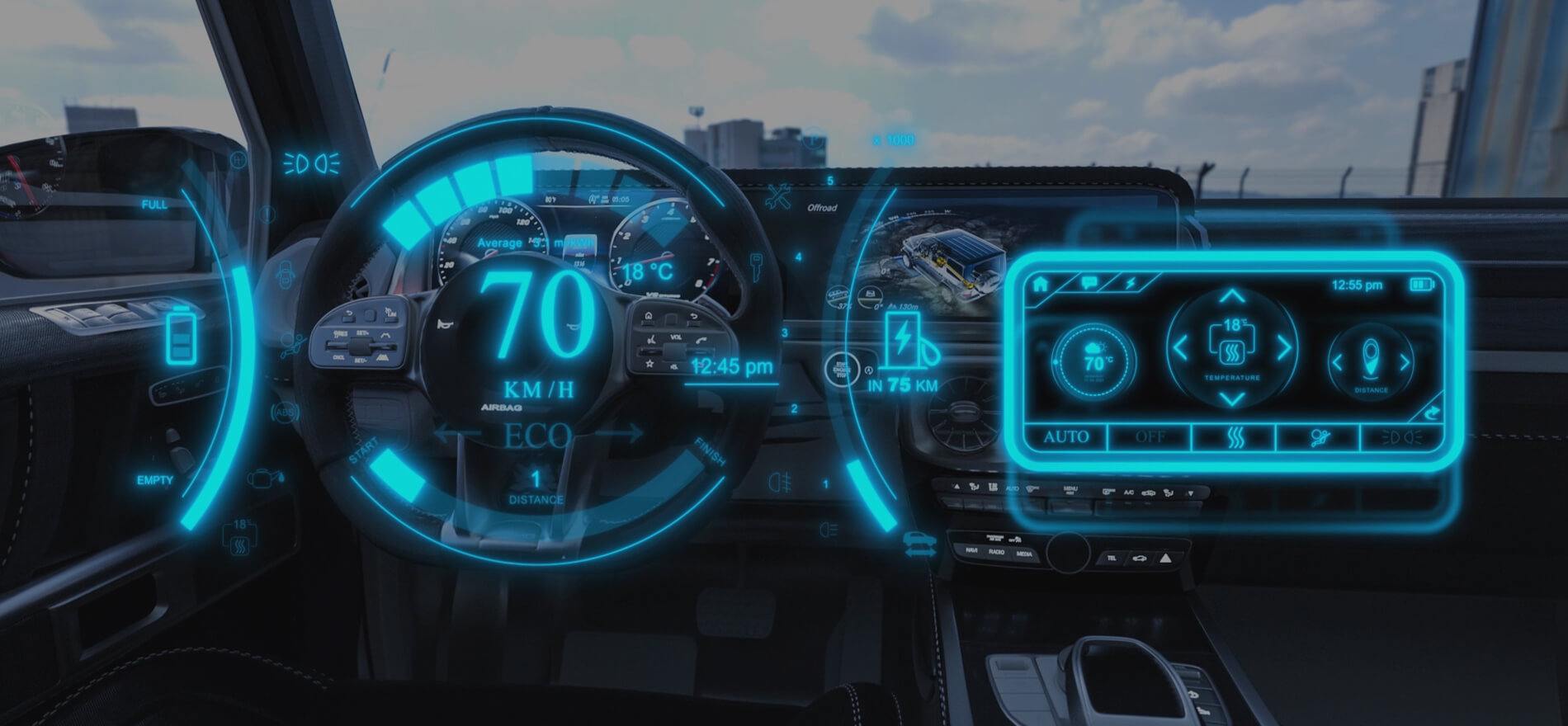
自动驾驶,这一结合了人工智能、计算机视觉和大数据的前沿技术,正悄然改变着我们的出行方式。想象一下,在未来的某一天,你坐在无人驾驶的汽车里,悠闲地享受着旅程,而车辆则凭借精密的传感器网络和高级算法,自主穿梭在城市的街道上。这样的场景,如今已不再遥不可及。本文将带你领略自动驾驶的几个趣味瞬间,并探讨其背后的技术原理与最新热点话题。
自动驾驶技术的发展,可以根据其自动化程度分为六个等级,从L0级(无自动)到L5级(全自动化)。在L0级,驾驶者需全程掌控油门、刹车和方向盘;而在L5级,人类则完全成为乘客,享受出行的便利。目前,市场上已有不少车型达到了L2级或L3级自动驾驶,如特斯拉的Autopilot系统、奥迪A8的Traffic Jam Pilot等。据统计,到2025年,已有多个城市合规网约车数量超过出租巡游车,其中不少车辆已具备L4级或更高级别的自动驾驶能力。这一趋势预示着,自动驾驶正逐步从概念走向现实。
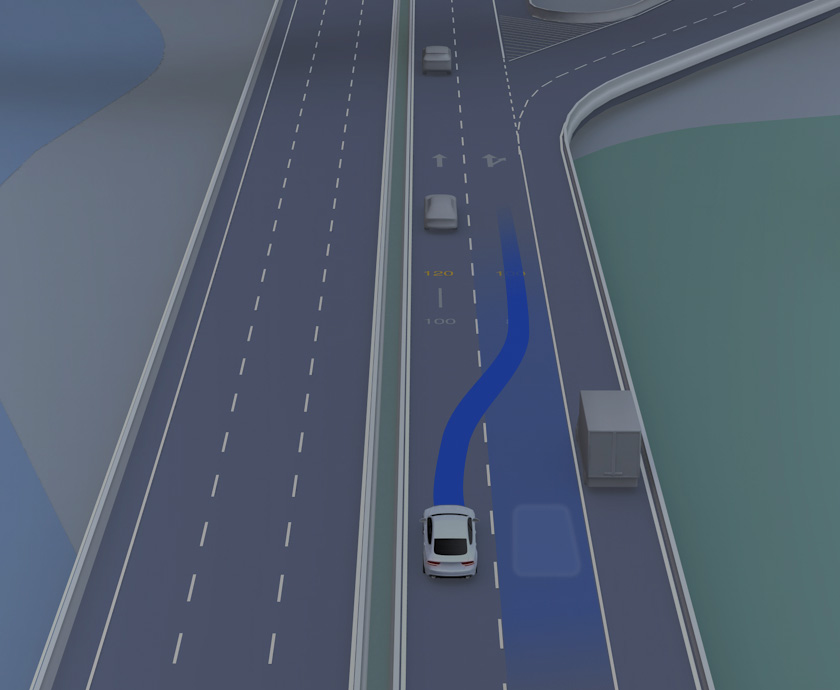
端到端自动驾驶是当前自动驾驶技术的一个重要研究方向。它通过直接从传感器输入(如摄像头、激光雷达等)到控制输出(如方向盘角度、油门和刹车控制)的映射,简化了传统自动驾驶系统中复杂的模块化结构。这种方法不仅提高💿【】了系统的灵活性和适应性,还能更好地处理复杂的交通场景。例如,在应对突发情况时,端到端自动驾驶系统能够迅速做出决策,避免碰撞。据最新研究,端到端自动驾驶在学术界和工业界都受到了广泛关注,成为自动驾驶领域的一大热点。
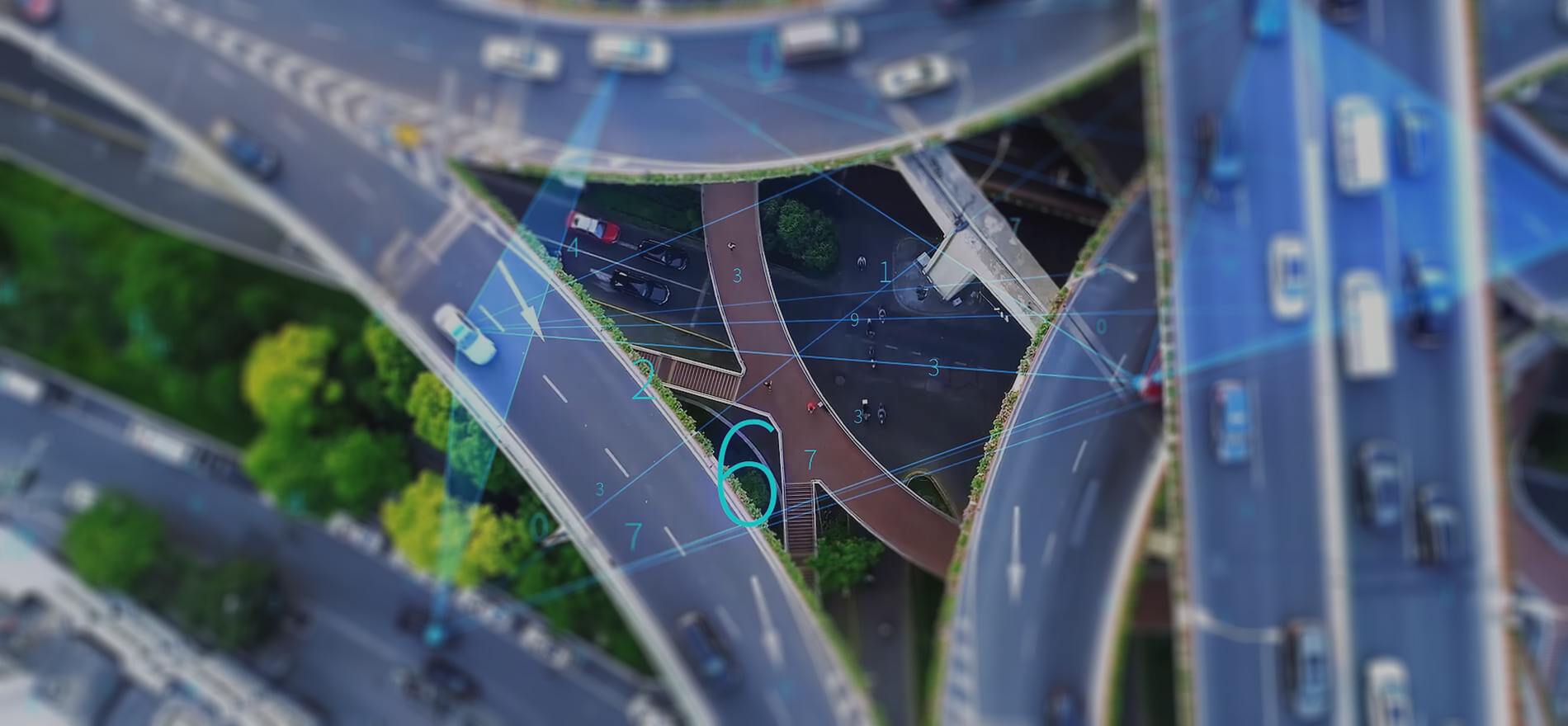
鸟瞰图(BEV, Bird's Eye View)感知是自动驾驶领域的另一个新兴研究方向。它将传感器数据转换为鸟瞰图视角,从而更好地理解和建模交通场景中的空间关系。BEV感知能够有效地处理遮挡问题,并且可以更自然地融合多源传感器数据,如摄像头和激光雷达。在目标检测、轨迹预测和地图构建等方面,BEV感知都取得了显著进展。例如,在目标检测任务中,BEV感知系统能够准确识别出道路上的行人、车辆和其他障碍物,为自动驾驶车辆提供全面的环境感知。这一技术的不断发展,将进一步推动自动驾驶技术的成熟与应用。
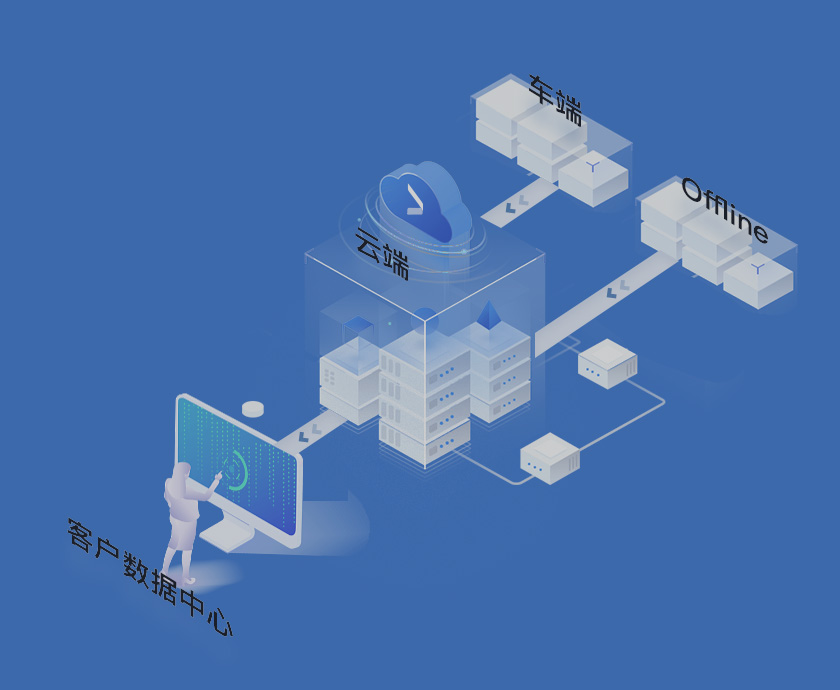
多模态大模型是当下人工智能领域的焦点之一,也是自动驾驶技术的重要支撑。它融合文本、图像、语音等多种数据模态,突破单一模态的局限,让机器像人类一样全面感知世界。在自动驾驶领域,多模态大模型能够整合来自不同传感器的数据,实现对周围环境的精准感知与理解。例如,在应对恶劣天气或复杂路况时,多模态大模型能够综合视觉、雷达等多种信息,为自动驾驶车辆提供可靠的决策依据。此外,随着技术的不断进步,多模态大模型在智能驾驶、医疗诊断、智能客服等领域都展现出了巨大的潜力。
自动驾驶的趣味瞬间远不止于此。从激光雷达的精准测距到高精地图的实时更新,从仿真测试的严谨验(yàn)证(zhèng)到(dào)车(chē)路协(xié)同(tóng)的(de)智(zhì)慧(huì)交(jiāo)通(tōng),每(měi)一(yī)项(xiàng)技(jì)术(shù)的(de)进(jìn)步(bù)都(dōu)在(zài)为(wèi)自(zì)动(dòng)驾(jià)驶(shǐ)的(de)普(pǔ)及(jí)铺(pù)平(píng)道(dào)路。未(wèi)来(lái),随(suí)着(zhe)技(jì)术(shù)的(de)不(bù)断(duàn)成(chéng)熟(shú)和(hé)政(zhèng)策(cè)的(de)逐(zhú)步(bù)完(wán)善(shàn),自(zì)动(dòng)驾(jià)驶(shǐ)汽(qì)车(chē)将(jiāng)广(guǎng)泛(fàn)普(pǔ)及(jí)于(yú)我(wǒ)们(men)的(de)日(rì)常(cháng)生(shēng)活(huó)中(zhōng),为(wèi)出(chū)行(xíng)带(dài)来(lái)前(qián)所(suǒ)未(wèi)有(yǒu)的(de)便(biàn)利(lì)与(yǔ)舒(shū)适(shì)。让(ràng)我(wǒ)们(men)共(gòng)同(tóng)期(qī)待(dài)这(zhè)一(yī)美(měi)好(hǎo)未(wèi)来(lái)的(de)到(dào)来(lái)吧(ba)!
















 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



