
2025-07-05 04:01:25
作者:科技
分享:


**自动驾驶技术研发*📀*

随着科技的飞速发展,自动驾驶技术已成🆘【】为汽车行业最引人注目的革新之一。它不仅重塑了交通出行的概念,还引领了一场前所未有的技术革命。本文将深入探讨自动驾驶技术的核心研发内容,结合最新热点话题,为读者揭示这一领域的现状与未来。
自动驾驶技术的研发涉及多个关键技术的突破与融合。其中,环境感知、智能决策与规划、精准定位是三大核心技术。环境感知主要依靠摄像头、激光雷达和毫米波雷达等多种传感器构建“视听”体系。例如,激光雷达通过发射激光束并接收反射信号,能构建出高精度的三维环境模型,让汽🈴车对周围环境了如指掌。据2025年的最新数据,速腾聚创的EM4激光雷达通过MEMS微振镜技术,将量产成本压缩至499美元,探测距离突破300米。智能决策与规划则如同汽车的“大脑”,将感知系统收集的数据进行深度分析,制定出最佳行驶策略。而精准定位技术结合GPS全球定位系统、IMU惯性测量单元和高清地图,可实现厘米级的定位精度。
端到端自动驾驶(E2E-AD)是当前的一个热门研究方向,它通过直接从传感器输入到控制输出的映射,简化了传统自动驾驶系统的模块化结构。这种方法在处理复杂交通场景时表现出更高的灵活性和适应性。与此同时,鸟瞰图(BEV)感知技术也在迅速发展,通过将传感(gǎn)器(qì)数(shù)据转换为鸟瞰图视角,更好地理解和建模交通场景中的空间关系。BEV感知在目标检测、轨迹预测和地图构建等方面取得了显著进展,成为自动驾驶感知模块的一个重要发展方向。这些新技术的融合,正推动自动驾驶技术向更高层次迈进。
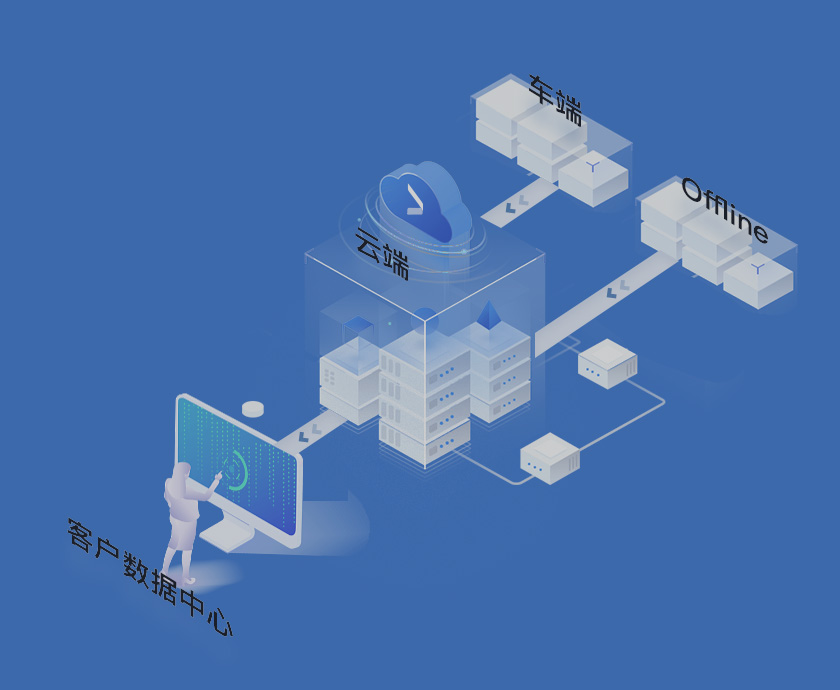
数据闭环是自动驾驶系统持续进化的核心驱动力。它包括数据采集、标注、训练、仿真、测试到OTA升级的全生命周期管理。特斯拉的“影子模式”率先验证了该体系的价值,使系统迭代效率提升300%以上。而在线高精地图技术则突破了传统图商的更新周期限制,通过车端众包感知实现道(dào)路要(yào)素(sù)的(de)分(fēn)钟(zhōng)级更新。例如,小鹏NGP3.0已实现从“无图”到“轻图”的跨越,百度Apollo则通过道路语言大模型提升拓扑推🌸【】理能力,推动高精地图进入实时众包时代。这些技术的革新,为自动驾驶系统的精准决策提供了有力支持。
多模态大模型能够同时处理和理解多种不同模态的数据,如图像、文本、语音等,为自动驾驶提供了更全面、更精准的感知能力。而世界模型则是自动驾驶认知系统的核心构建模块,它通过整合传感器数据与环境信息,实时模拟交通参与者的行为逻辑和场景演变规律。特斯拉的“Occupancy Networks”和Waymo的“ChauffeurNet”均体现了该方向的前沿探索。这些模型的应用,使得自动驾驶系统能够更好地适应复杂多变的交通环境。
综上所述,自动驾驶技术的研发是一个涉及多个关键技术突破与融合的系统工程。从端到端自动驾驶、BEV感知的新进展,到数据闭环与在线高精地图的革新,再到多模态大模型与世界模型的应用,每一项技术的突破都为自动驾驶技术的发展注入了新的活力。随着这些技术的不断成熟和完善,自动驾驶汽车将逐渐从实验室走向街头巷尾,为人们的出行带来更加安全、便捷和智能的体验。我们有理由相信,在不远的将来,自动驾驶技术将成为改变人类生活方式的重要力量。















 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



