
2025-07-16 00:01:26
作者:科技
分享:


### AP自动驾驶变道技术
在自动驾驶技术的浪潮中,AP(Autopilot)自动驾驶变道技术无疑是备受瞩目的焦点之一。这项技术的出现,不仅极大地提升了驾驶的便捷性和安全性,更是为自动驾驶的未来铺平了道路。本文将深入探讨AP自动驾驶变道技术的几个主要方面,结合当下最新相关热点话题,为读者提供有深度、有(yǒu)价(jià)值(zhí)的(de)信(xìn)息(xi)。
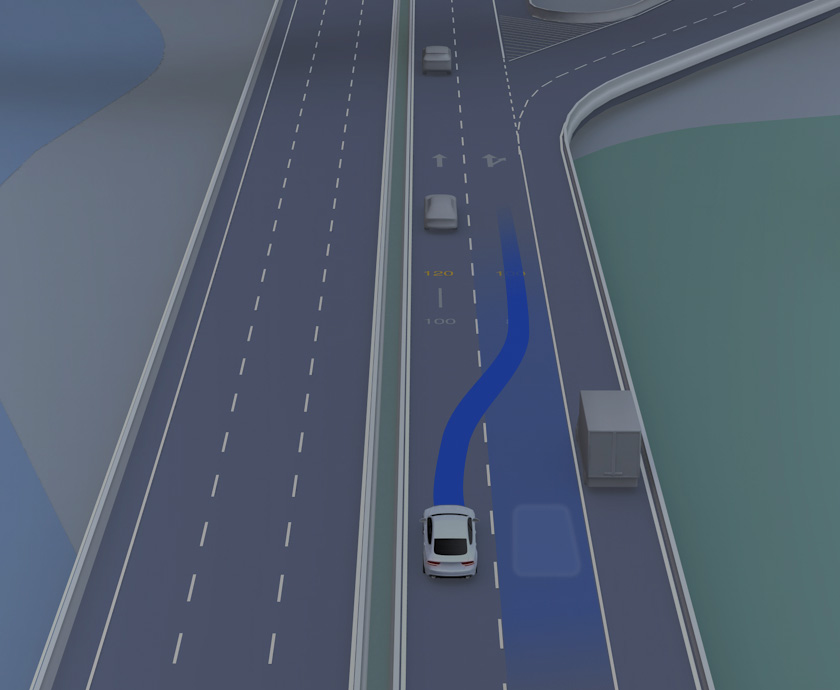
AP自(zì)动(dòng)驾(jià)驶(shǐ)变(biàn)道(dào)技(jì)术(shù)是(shì)现(xiàn)代(dài)智(zhì)能(néng)驾(jià)驶(shǐ)技(jì)术(shù)的(de)一(yī)种(zhǒng)重(zhòng)要(yào)应(yīng)用(yòng),它(tā)允(yǔn)许(xǔ)车(chē)辆(liàng)在(zài)特(tè)定(dìng)条(tiáo)件(jiàn)下(xià)自(zì)主完(wán)成(chéng)变(biàn)道(dào)操(cāo)作(zuò)。特(tè)斯(sī)拉(lā)等(děng)公(gōng)司(sī)在(zài)这(zhè)一(yī)领(lǐng)域处(chù)于(yú)领(lǐng)先(xiān)地(de)位(wèi),其(qí)AP系(xì)统(tǒng)早(zǎo)在(zài)2025年(nián)底(dǐ)就(jiù)已(yǐ)实(shí)现(xiàn)了(le)打(dǎ)灯(dēng)自(zì)动(dòng)变(biàn)道(dào)功(gōng)能(néng)。这(zhè)一(yī)技(jì)术(shù)的(de)优(yōu)势(shì)在(zài)于(yú),它(tā)能(néng)够(gòu)为(wèi)驾(jià)驶(shǐ)者(zhě)提(tí)供(gōng)流(liú)畅(chàng)丝(sī)滑(huá)的(de)驾(jià)驶(shǐ)体(tǐ)验(yàn),有(yǒu)效(xiào)缓(huǎn)解(jiě)驾(jià)驶(shǐ)疲(pí)劳(láo)。例(lì)如(rú),在(zài)日(rì)常(cháng)使(shǐ)用(yòng)中(zhōng),特(tè)斯(sī)拉(lā)的(de)AP系(xì)统(tǒng)可(kě)以(yǐ)在(zài)检(jiǎn)测(cè)到(dào)后(hòu)方(fāng)没(méi)有(yǒu)来(lái)车(chē)的(de)情(qíng)况(kuàng)下(xià),先(xiān)减(jiǎn)速(sù)留(liú)出(chū)变(biàn)道(dào)空(kōng)间(jiān),完(wán)成(chéng)变(biàn)道(dào)后(hòu)再(zài)提(tí)速(sù),整(zhěng)个(gè)过(guò)程(chéng)非(fēi)常(cháng)智(zhì)能(néng)且(qiě)流(liú)畅(chàng)。
近年来,AP自动驾驶变道技术取得了显著的进展。一方面,随着激光雷达、仿生视觉、4D毫米波雷达等传感器技术的不断突破,自动驾驶系统对周围环境的感知能力得到了大幅提升。例如,特斯拉的第三代仿生镜头模仿鹰眼结构,支持从10米到500米的无级变焦,夜间行人识别准确率提升至98.7%。另一方面,算法架构的范式革命也极大地提升了自动驾驶系统的(de)决(jué)策(cè)能(néng)力(lì)。特(tè)斯(sī)拉(lā)FSD V13.2将(jiāng)代(dài)码(mǎ)行(xíng)数(shù)从(cóng)30万(wàn)行(xíng)压(yā)缩(suō)至(zhì)10万行,决策延迟降低至50ms,使得自动驾驶系统能够更快速、更准确地做出变道决策。
据相关数据显示,基于大语言模型(LLM)的可解释变道预测框架LC-LLM在变道预测任务中展现出卓越性能。具体而言,LC-LLM的变道意图预测准确率较基线模型提升16.7%,横向轨迹预测误差(RMSE)降低57.2%,纵向轨迹预测误差(RMSE)降低48.1%。这一结果表明,邻近车辆信息的融合对轨迹预测精度具有决定性作用,而⛵️【】链式思维(CoT)推理机制的引入则显著优化了预测结果的时空一致性。这些技术进展为AP自动驾驶变道技术的进一步提升提供了有力支持。
尽(jǐn)管(guǎn)AP自(zì)动(dòng)驾(jià)驶(shǐ)变(biàn)道(dào)技(jì)术(shù)取(qǔ)得(de)了(le)显(xiǎn)著(zhe)进(jìn)展(zhǎn),但(dàn)它(tā)仍(réng)面(miàn)临(lín)诸(zhū)多(duō)挑(tiāo)战(zhàn)。首(shǒu)先(xiān),在(zài)复(fù)杂(zá)的(de)交(jiāo)通(tōng)环(huán)境(jìng)中(zhōng),如(rú)大(dà)巴(ba)、出(chū)租(zū)车(chē)等(děng)车辆随意加塞时,AP可能无法做出及时准确的判断和反应,需要驾驶员主动介入。其次,AP对地图的要求较高,如果地图数据不准确或更新不及时,可能会影响自动驾驶系统的使用体验。此外,在会车时,AP可能会紧急制动,造成车内人员惯性前冲和后车追尾的风险。
然而,随着技术的不断进步和法规的逐步完善,AP自动驾驶变道技术的未来展望依然广阔。一方面,随着传感器技术的进一步突破和算法架构的不断优化,自动驾驶系统对周围环境的感知能力和决策能力将得到进一步提升。另一方面,随着5G-V2X等车路协同技术的落地应用,自动驾驶系统将与道路基础设施实现更紧密的协同工作,从而进一步提升自动驾驶的安全性和可靠性。
AP自动驾驶变道技术不仅是一项前沿的自动驾驶技术,更是未来智能交通系统的重要组成部分。随着自动驾驶技术的不断发展和普及,未来的交通系统将更加智能化、高效化和绿色化。例如,通过自动驾驶技术的应用,可以实现车辆之间的协同行驶和紧急避让等功能,从而大幅提升道路通行效率和安全性。同时,自动驾驶技术还可以与智能停车、智能充电等技术相结合,为驾驶员提供更加便捷、高效的出行体验。
此外,AP自动驾驶变道技术还可以为城市交通规划和管理提供有力支持。通过实时采集和分析车辆行驶数据,可以更加准确地了解城市交通流量和拥堵情况,从而制定更加科学合理的交通规划和管理方案。同时,自动驾驶技术的应用还可以降低交通事故的发生率,减轻交通警察的工作压力,提高城市交通管理的效率和水平。
总之,AP自动驾驶变道技术作为现代智能驾驶技术的重要应用之一,具有广阔的应用前景和深远的社会意义。随着技术的不断进步和法规的逐步完善,我们有理由相信,未来的自动驾驶系统将更加智能、高效和安全,为人类的出行带来更加便捷和舒适的体验。
















 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



