
2025-07-20 12:01:27
作者:科技
分享:


自动驾驶技术,作为未来交通领域的明星技术,正逐步从实验室走向实际应用。然而,自动驾驶测试作为确保其安全性和可靠性的关键环节,面临着诸多挑战。📀入口本文将围绕“自动驾驶测试挑战”这一主题,探讨当前自动驾驶测试面临的主要挑战、最新热点话题以及未来的发展趋势。

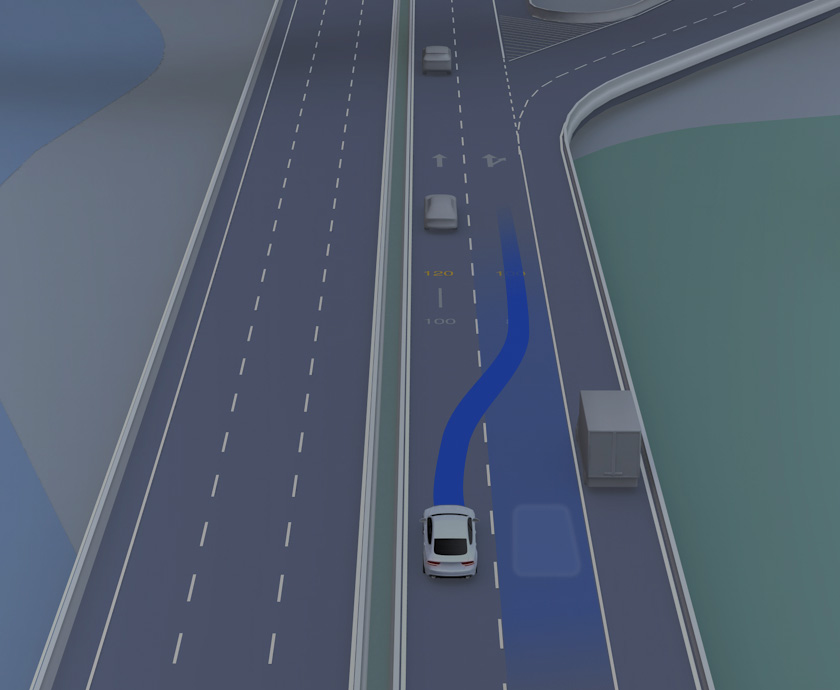
自动驾驶系统的复杂性是传统车辆系统无法比拟的。以三级(L3)及以上自动驾驶系统为例,其运行依赖多层次的模块协同,包括感知模块的多源数据采集与融合、决策模块的动态环境预测与规划、以及控制模块的路径执行与调整。感知模块通过激光雷达、摄像头、毫米波雷达等多种传感器采集环境信息,但各传感器存在技术局限性,如激光雷达在雨雪条件下性能下降,摄像头在强逆光下成像能力受限。这种多源数据融合技术对时间同步和空间对齐提出了极高要求,测试任务也极其复杂。决策模块需要对感知到的环境进行实时分析,预测其他交通参与者的行为并规划安全路径,其测试的核心在于验证规划策略的合理性和鲁棒性。控制模块则负责将决策转化🆘为车辆(liàng)的(de)具(jù)体(tǐ)操(cāo)作(zuò),如(rú)转(zhuǎn)向(xiàng)、加(jiā)速(sù)或(huò)刹(shā)车(chē),其(qí)性(xìng)能(néng)直(zhí)接(jiē)影(yǐng)响(xiǎng)车(chē)辆(liàng)执(zhí)行(xíng)的(de)精(jīng)度(dù)与(yǔ)响(xiǎng)应(yīng)延(yán)迟(chí)。
据(jù)麻(má)省(shěng)理(lǐ)工(gōng)学(xué)院(yuàn)2025年(nián)研(yán)究(jiū)指(zhǐ)出(chū),要(yào)证(zhèng)明(míng)自(zì)动(dòng)驾驶汽车比人类驾驶员安全20%,至少需要50亿英里的测试数据,这是当前行业总测试里程的数百倍。这种验证成本的指数级增长,构成了技术商业化难以逾越的经济壁垒。
自动驾驶车辆的运行环境极其复杂,包括不同的地形、天气、交通规则和驾驶习惯等。一个自动驾驶系统若要适应所有可能的场景,其测试覆盖范围需要达到理论上的“无限复杂性”。现实中场景的多样性远超测试能力,尤其是“长尾场景”(低概率但高风险的场景)的生成极具挑战性。例如,一名行人在夜晚突然横穿马路的场景可能千分之一的概率发生,但对系统性能验证却至关重要。
场景生成技术经历了从人工规则设计到数据驱动生成的转变。当前,基于数据驱动的场景生成成为主流,利用机器学习技术从真实数据中提取场景特征,并生成具有代表性的场景。然而,尽管场景生成技术已取得显著进展,但仍存在真实性与多样性的权衡、生成效率的提升以及跨区域场景适配等瓶颈。生成的场景需在真实性和多样性之间取得平衡,既能准确反映真实环境,又能涵盖极端条件。同时,当前高维场景生成计算成本较(jiào)高(gāo),限(xiàn)制(zhì)了(le)大(dà)规(guī)模(mó)测(cè)试(shì)的(de)实(shí)施(shī)。此(cǐ)外(wài),针(zhēn)对(duì)不(bù)同(tóng)地(de)区(qū)特(tè)有(yǒu)的(de)道(dào)路结(jié)构(gòu)和(hé)交(jiāo)通(tōng)行(xíng)为(wèi),需(xū)进(jìn)一(yī)步(bù)提(tí)升(shēng)场(chǎng)景(jǐng)生(shēng)成的区域化能力。
在自动驾驶系统中,传感器融合是感知模块的核心任务,其目的是整合来自不同传感器的数据,生成统一且高精度的环境模型。然而,这种数据融合测试面临技术上的诸多挑战,尤其在实时性、精度和鲁棒性上。
不同传感器的采样频率、响应时间可能存在差异,如激光雷达通常以10Hz或更高频率运行,而摄像头可能是30Hz甚至更高。时间差异可能导致融合结果的不一致性,尤其在🈴高速场景下。此外,传感器之间的安装位置与角度不同,需要通过外参标定将它们的坐标系统一到同一参考框架下。测试任务包括校准误差的容忍度评估,以及在长期运行中因振动或环境变化导致的校准偏差监测。不同传感器的输出数据精度和噪声特性差异较大,测试需要重点评估融合算法如何处理高噪声数据对整体感知精度的影响。
为提高系统鲁棒性,多传感器融合通常会设计冗余机制以应对单一传感器故障。测试需验证当某些传感器失效或性能下降时,系统是否能够通过其他传感器的数据进行补偿。通过搭建动态测试场景,如可移动的行人假人、车辆目标,测试传感器在动态条件下的同步与融合性能。同时,结合硬件在环测试(HIL)和仿真与真实环境结合测试,验证融合算法的正确性和适应性。
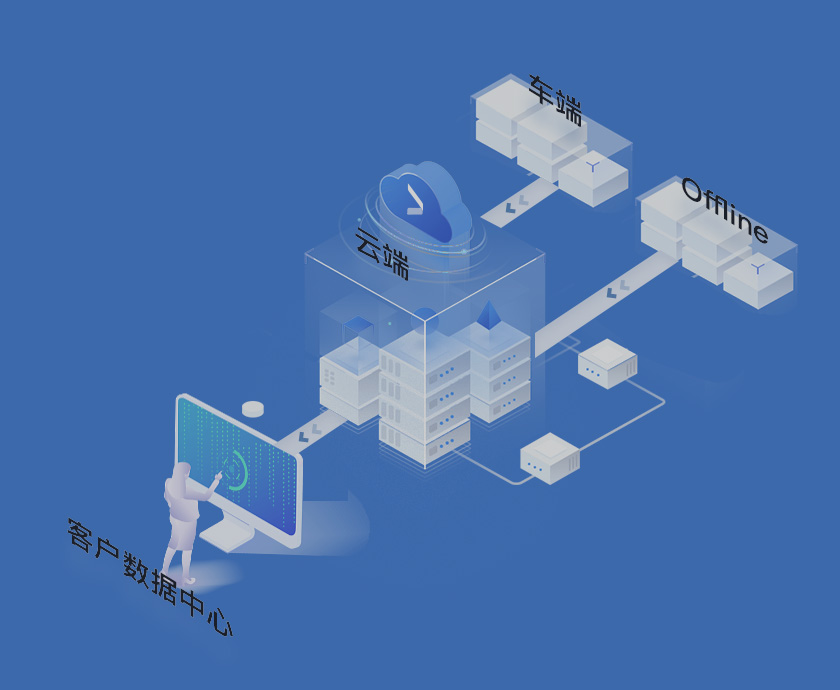
当前自动驾驶测试主要采用封闭场地测试、开放道路测试和仿真测试三种方式,但这三种方式各有局限,难以完全覆盖自动驾驶系统的测试需求。封闭场地测试通常用于模拟标准化场景,能有效验证车辆在典型场景中的表现,但对长尾场景覆盖不足。开放道路测试能反映系统在实际交通环境中的🌸入口性能,但成本高、效率低,同时受制于法律法规限制,难以测试高风险场景。仿真测试通过虚拟环境模拟海量驾驶场景,是当前业界重点探索的方向,但仿真环境与真实场景存在差异,特别是在动态交通流模拟和极端天气再现方面,仿真测试的可靠性仍需提升。
面对自动驾驶测试的挑战,行业正在积极探索突破路径。一方面,通过仿真测试与真实路测的融合,加速技术成熟。例如,NVIDIA的Drive Sim平台可实现每天1000万英里的虚拟测试,其光子级仿真引擎能还原99.9%的真实场景。另一方面,车路协同的中国特色方案为自动驾驶测试提供了新的思路。通过路侧智能设施弥补车载感知局限,可降低自动驾驶落地成本,提高测试效率。此外,渐进式商业落地策略也在为行业积累宝贵的商业化经验,从封闭场景到开放道路、从货运到客运的渐进路径,有助于逐步验证和完善自动驾驶系统的性能。
自动驾驶测试的挑战与机遇并存。随着技术的不断进步和相关政策的逐步完善,自动驾驶的商业化和普及逐渐可期。未来,自动驾驶技术将在多个领域创造出巨大的机遇,从共享出行到智能交通,从物流到环保,自动驾驶技术都将发挥重要作用。然而,如何在技术创新与社会责任、个人隐私之间找到平衡,将是自动驾驶领域成功的关键。
综上所述,自动驾驶测试面临的挑战复杂而多样,但正是这些挑战推动了技术的不断进步和完善。未来,随着技术的突破和政策的推进,自动驾驶技术将逐渐走向成熟,为人类出行带来更加安全、便捷和高效的体验。















 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



