
2025-08-31 00:01:41
作者:科技
分享:


### 自动驾驶测试挑战在科技飞速发展的今天,自动驾驶技术已经成为汽车行业乃至整个社会的热门话题。然而,自动驾驶技术从研发到实际应用,中间需要经过严格的测试环节,以确保其安全性和可靠性。本文将围绕“自动驾驶测试挑战”这一主题,探讨自动驾驶测试面临的主要挑战、最新热点话题以及未来的发展方向。
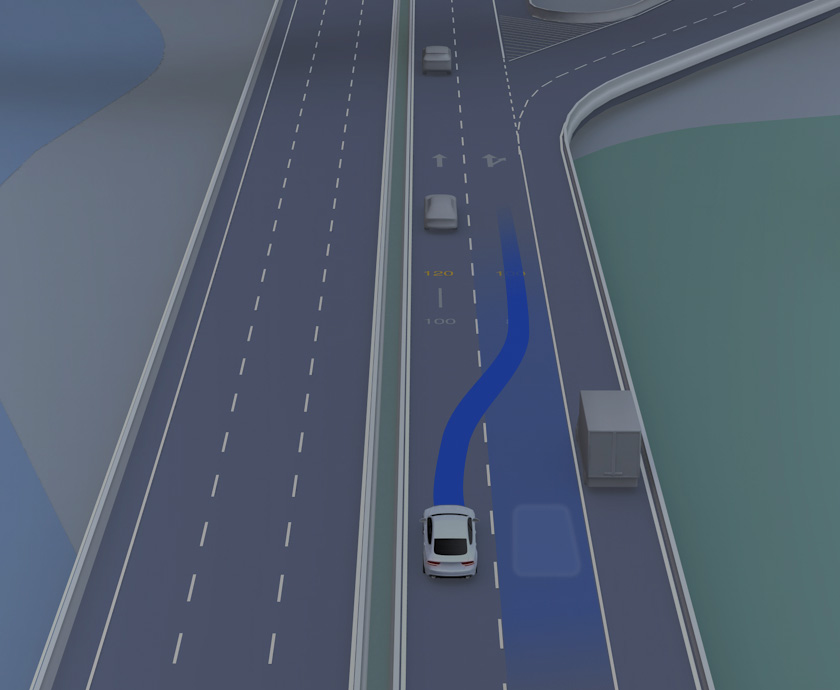
自动驾驶系统的测试需要覆盖各种复杂的驾驶场景,包括不同的地形、天气、交通规则和驾驶习惯等。一个自动驾驶系统若要适应所有可能的场景,其测试覆盖范围需要达到理论上的“无限复杂性”。然而,现实中场景的多样性远超测试能力,尤其是“长尾场景”的生成极具挑战性。例如,一名行人在夜晚突然横穿马路的场景可能千分之一的概率发生,但对系统性能验证却至关重要。根据最新的技术进展,场景生成技术已经经历了从人工规则设计到数据驱动生成的转变。尽管基于数据驱动的场景生成方法,如生成对抗网络(GAN),可以合成真实感极强的动态交通流场景,但在真实性与多样性的权衡、生成效率的提升以及跨区域场景适配等方面仍存在瓶颈。此外,不同国家和地区的交通法规和基础设施差异也增加了场景生成的复杂性。比如,欧洲的环岛设计与美国的十字路口截然不同,对测试场景建模提出了区域化适配的要求。
自动驾驶系统通过激光雷达、摄像头、毫米波雷达等多种传感器采集环境信息,这些数据需要通过融合算法实现一致性的环境感知。然而,多传感器数据融合测试面临诸多技术挑战,尤其在实时性、精度和鲁棒性上。不同传感器的采样频率、响应时间存在差异,例如激光雷达通常以10Hz或更高频率运行,而摄像头可能是30Hz甚至更高。这种时间差异可能导致融合结果的不一致性,尤其在高速场景下。此外(wài),传(chuán)感(gǎn)器之间的安装位置与角度不同,需要通过外参标定将它们的坐标系统一到同一参考框架下。不同传感器的输出数据精度和噪声特性也存在差异,测试需要重点评估融合算法如何处理高噪声数据对整体感知精度的影响。为了提高系统鲁棒性,多传感器融合通常会设计冗余机制以应对单一传感器故障。测试时需验证当某些传感器失效或性能下降时,系统是否能够通过其他传感器的数据进(jìn)行(xíng)补(bǔ)偿(cháng)。据(jù)行(xíng)业(yè)专(zhuān)家(jiā)介(jiè)绍(shào),通(tōng)过(guò)搭(dā)建(jiàn)动(dòng)态(tài)测(cè)试(shì)场(chǎng)景(jǐng)和(hé)硬(yìng)件(jiàn)在(zài)环(huán)测(cè)试(shì)(HIL),可(kě)以(yǐ)有(yǒu)效(xiào)验(yàn)证(zhèng)多(duō)传(chuán)感(gǎn)器(qì)融(róng)合(hé)的(de)性(xìng)能(néng)和(hé)鲁(lǔ)棒(bàng)性(xìng)。
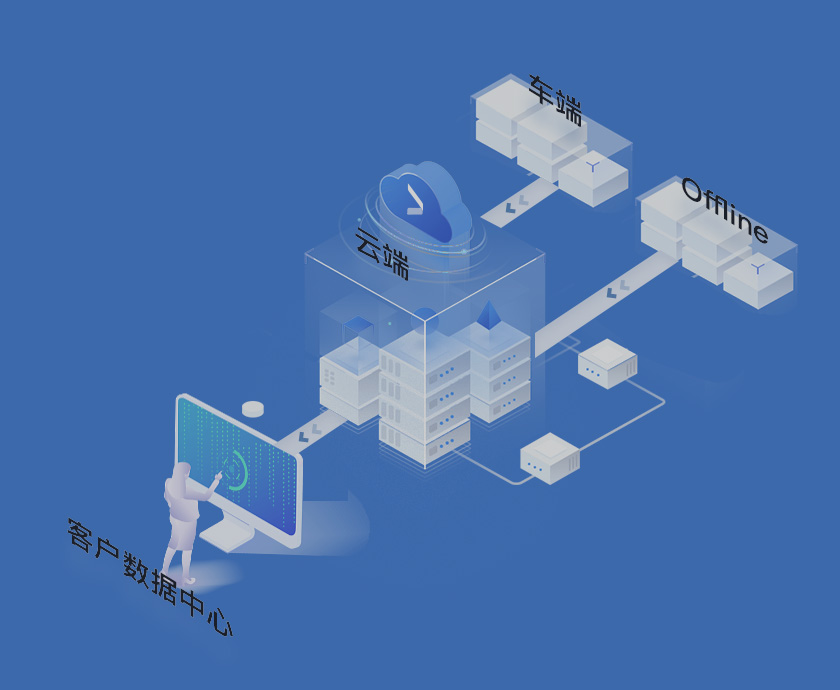
仿真测试是当前自动驾驶测试的重要方法之一,通过虚拟环境模拟海量驾驶场景,可以大幅降低测试成本和提高测试效率。然而,仿真环境与真实场景存在差异,特别是在动态交通流模拟和极端天气再现方面,仿真测试的可靠性仍需提升。为了实现仿真平台与实际场景的更好匹配,业界正在积极探索基于大数据和机器学习的仿真优化方法。通过收集真实道路测试数据,提取场景特征,并用于优化仿真模型,可以提高仿真测试的真实性和准确性。此外,结合仿真与真实环境结合测试,即先在仿真环境中覆盖极端场景,再在真实环境中验证模型的泛化能力,也是一种有效的测试策略。从个人经验来看,自动驾驶技术的安全性和可靠性是公众最为关心的问题之一。因此,在自动驾驶测试过程中,必须充分考虑各种复杂场景和极端条件,确保系统在各种情况下都能稳定运行。同时,随着技术的不断进步和政策的逐步完善,自动驾驶的商业化和普及也将逐渐可期。未来,自动驾驶技术有望在城市交通管理、共享出行、物流运输等领域发挥重要作用,为人们的生活带来更多便利和效率。
总之,自动驾驶测试面临的挑战是多方面的,包括场景生成的多样性与准确性、多传感器数据融合的精度验证以及仿真平台与实际场景的匹配等。通过不断探索和创新,业界正在逐步克服这些挑战,推动自动驾驶技术向更高水平发展。随着技术的成熟和应用场景的不断扩展,自动驾驶有望在未来成为城市交通的重要组成部分,为人们的生活带来更多便利和安全。
















 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



