
2025-10-12 00:01:11
作者:科技
分享:


### 自🔋全站动驾驶地图精度探讨

自动驾驶技术的飞速发展,使得自动驾驶地图的精度成为了行业内外关注的焦点。今天,我们就来聊聊自动驾驶地🈁图精度的重要性、现状以及未来趋势。
高精度地图,也称为高分辨率地图(High Definition Map, HD Map)或高度自动驾驶地图(Highly Automated Driving Map, HAD Map),是自动驾驶解决方案的核心和基础。与普通导航地图相比,高精度地图在精度、数据维度、时效性以及使用对象等方面有着显著不同。普通导航地图的精度一般为米级,而高精度地图可达到厘米级,甚至更高。这种高精度使得自动驾驶车辆能够更准确地感知周围环境,做出更安全的驾驶决策。
根据《智能网联汽车技术路线图2.0》规划,2025🈵年L2/L3级自动驾驶新车渗透率将达到50%。高精度地图作为L3及以上自动驾驶感知层核心技术之一,其重要性不言而喻。它不仅能够提供车道级路径规划,还能辅助环境感知、定位和控制,是自动驾驶车辆的“眼睛”。
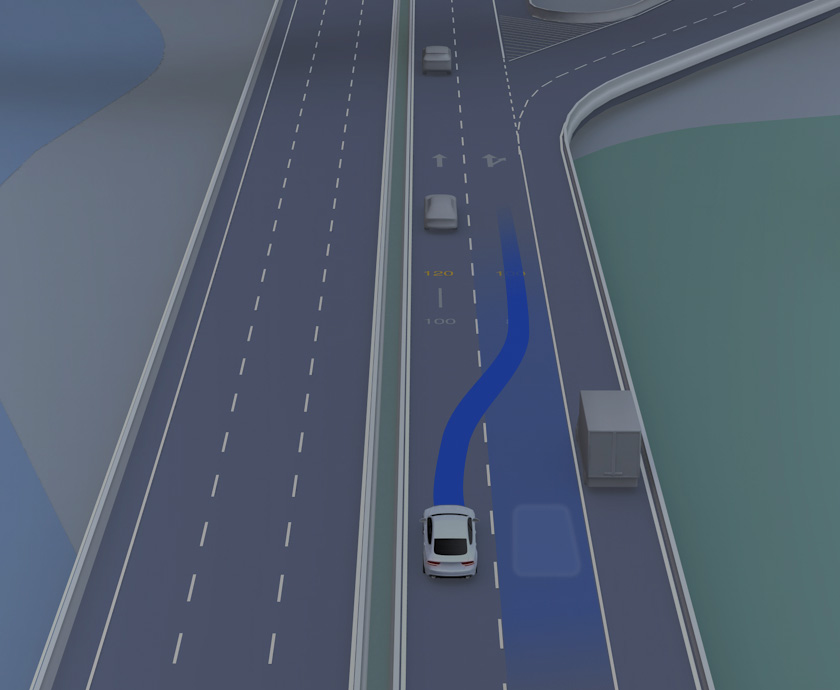
近年来,随着技术的不断进步,自动驾驶地图正在从“记录过去”向“预演未来”演进。传统的自动驾驶地图主要依赖于离线高精度地图,但这种方式存在更新滞后、成本高昂等问题。因此,“无图NOA”(No Offline Advanced 🌵全站Driving Assistance System Map)方案应运而生,该方案降低了对离线高精度地图的依赖,转而依赖于实时生成的地图。
“无图NOA”的核心在于在线建矢量级地图,再与离线的轻量化地图(LD MAP)匹配,同时获得定位和导航信息。这种方式更接近早期的SLAM技术,但随着BEV(Bird's Eye View)等技术的出现,SLAM技术逐渐被淘汰,但在某些特定场景(如地下停车场)仍有应用。未来,随着3D高斯溅射、神经辐射场NeRF(Neural Radiance Fields)等新技术融入,自动驾驶地图将构建“世界模型”,通过自监督学习从海量驾驶数据中提取时空规律,实现道路拓扑、语义信息及交通规则的在线推理。
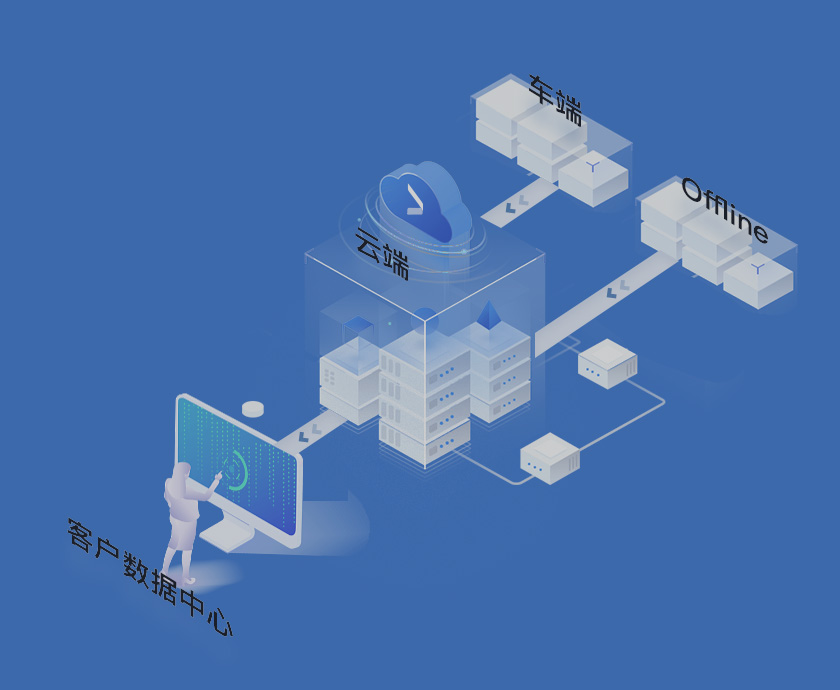
自动驾驶地图的采集与更新是一个复杂而艰巨的任务。高精度地图需要大范围内足量且实时的有效道路数据作为支撑,这需要通过专业测绘、专包采集和众包采集等多种方式来实现。其中,移动测绘车生产是最为常用的生产方式,但成本高、数据量大、专业人员需求等问题限制了其大规模应用。而众包采集则相对成本低、数据来源丰富、实时性高,但传感器数据来源和标准不一、精度不够等问题也需要解决。
不过,随着技术的不断进步和成本的逐渐降低,自动驾驶地图的采集与更新将变得更加高效和便捷。例如,百度人机共驾地图Baidu MapAuto 6.5就采用了上十亿级别参数的地图生成大模型,使得地图生产制作效率提升了一个数量级,有效支撑了百度地图数据的快速更新。此外,多家主机厂也开始探索或部署NeRF技术于自动驾驶地图领域,尤其在动态场景重建与高精度地图生成中表现出显著优势。
综上所述,自动驾驶地图的精度是自动驾驶技术发展的关键一环。随着技术的不断进步和成本的逐渐降低,自动驾驶地图将变得更加精确、高效和智能。未来,我们有望看到更多高精度、实时更新的自动驾驶地图应用于实际场景中,为自动驾驶技术的发展提供有力支持。















 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



